تحليل و شبيهسازی يک ربات دونده ششپا عنوان پایان نامه ای است که توسط دو تن از دانشجویان دانشگاه شریف برای دوره کارشناسی تدوین شده است و شما می توانید این پایان نامه را در قالب نرم افزار WORD و به صورت لایه باز و قابل ویرایش دانلود نمایید.
این پایان نامه قابل استفاده برای دانشجویان برق، رباتیک و مکاترونیک و حتی مکانیک می باشد.
در مقدمه تحليل و شبيهسازی يک ربات دوندة ششپا آمده است:
در طول تاريخ پاها اولين وسايل براي جابجايي او بودند. با بزرگتر شدن اجتماعات و پيدايش شهرها، پيمودن مسافتهاي طولاني ديگر براي او طاقت فرسا و گاهي غيرممكن بود.
ظهور وسايط نقليه بطور ناباورانهاي حمل ونقل را آسان كرد. و در اين ميان چرخها نقش بزرگي را ايفا كردند. ميليونها مايل از جادهها ساخته شدند… تا امروز كه ديگر اتومبيل آنچنان در فرهنگ ما نفوذ كرده است كه راه رفتن و دويدن ديگر به عنوان سركشي بكار ميروند!
با اين وجود هنوز خيلي از مناطق هستند كه ماشينها نميتوانند به آنجا بروند. درصد بسياري از سطوح زمين براي وسايل چرخدار غيرقابل دسترسي است. مانند مناطق بياباني نمادها، مناطق شهري بلازده مناطق مين گذاري شده كه مجبوريم بخاطر خطرات موجود بدون استفاده از نيروهاي انساني به اين مناطق كه اكثرا خالي از جمعيت نيز هستند برويم.
محققين با وجود سختيهاي قابل پيشبيني براي ساختن رباتهاي راه رونده و در ادامه، رباتهاي دونده تلاش زيادي كردهاند. در 25 سال اخير پيشرفت چشمگيري در ساخت رباتها ايجاد شده كه اين پيشرفتها بيشتر در مورد حركت پاهاي ربات بوده. بعضي از خصوصيات ذاتي حركت پا، موفقيتها در ساخت ربات را محدود كرده است. در مقايسه با نمونههاي ساخته شده دست بشر، حيوانات نمونههاي توانايي در حركت هستند. توانايي آنها در پيمودن سطوح ناهموار غيرقابل پيشبيني بينظير است.
حيوانات آشفتگيهاي موجود در مسير را توسط مغز خود دريافت كرده و با عكس العمل خود گامها را منظم كرده و به كمك انعطاف پذيري انفعالي، خود را متعادل ميكنند كه در رباتها به كمك سنسورهاي اينرسي، ؟؟ داراي برنامه ريزيهاي گامها مشخص كردن بخشهاي انعطاف پذير و ساير سيستمهاي مصنوعي به حل اين مشكلات پرداخته شده است.
اخيرا تحقيقات زيست شناسان در تقليد از اصول و قواعد كلي حاكم بر راه رفتن حيوانات و استفاده از اين اصول در رباتها پيشرفت چشمگيري داشته است. اما با وجود تلاشهاي فراواني كه در مورد اين گونه رباتها، رباتهاي راه رونده و دونده انجام شده است، هنوز اين رباتها نتوانستهاند جاي رباتهاي چرخدار را بگيرند.
هدف از اين پروژه شبيهسازي و تحليل يك دسته از رباتهاي دونده كه در ساختشان از طبيعت الهام گرفته شده است ميباشد. اين رباتها نياز به جادهاي خاص و با برنامه ريزي قبلي ندارند و ميتوانند به راحتي از موانع بگذرند، بچرخند و حتي در فعاليتهاي مختلف ورزشي مانند شنا، كوهنوردي و… بكار گرفته شوند. مزيت اين رباتها در اين است كه در نواحي خشن و غيرقابل پيشبيني حركتي سريعتر و متعادل تري نسبت به رباتهاي پيشين دارند.
در چکیده انگلیسی تحليل و شبيهسازی يک ربات دونده ششپا آمده است:
Abstract
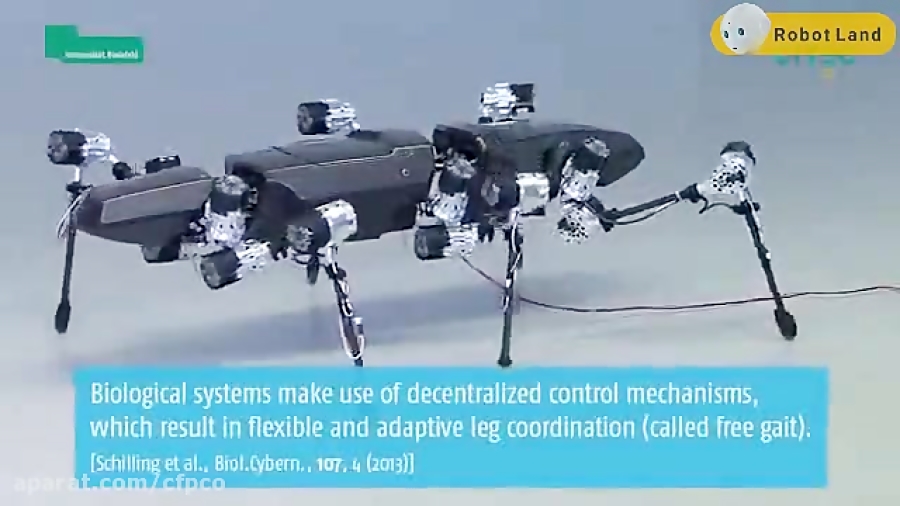
Animals are the current gold standard of locomotion ability. Their ability to navigate rough terrain is unmatched by their man-made counterparts. Recent studies by biologists have begun to demonstrate some of the principles behind their remarkable capabilities. In particular, studies of cockroaches have shown that they use a feed-forward motor actuation pattern that is virtually unchanged, even when running over very rough terrain. It appears that their considerable structural compliance contributes significantly to their stability when running. Their sprawled posture and tuned impedance in their musculoskeletal system enable an instantaneous or preflex response to disturbances. This allows for rapid response to the large perturbations experienced when interacting with irregular terrain.
Consideration of these principles has led to the design of the Sprawl family of robots, which features one active thruster and one entirely passive rotary joint on each leg. Without these spring elements the robots would not be able to run. With them, they can easily overcome hip-height obstacles without any alteration of their open-loop controller. The robots function as tuned oscillating systems and small changes in their physical parameters (e.g. leg stiffness and damping) can produce large changes in their speed and stability.
Simple conceptual models of hopping have been used to analyze the effects of modifying the open-loop control system on system performance. These simple onelegged models have proven effective in helping to tune the actuation dynamics of the robot, but their simplicity precludes their use in tuning the sprawled self-stabilizing posture of the robot.
This thesis describes the development, calibration, and analysis of a three-dimensional dynamic simulation of the Sprawl robots. This simulation was developed as a design tool to investigate the effects of parameter variation, and to gain understanding about how to tune the leg configuration and hip impedance which constitute the self-stabilizing posture of the robot.